咨詢熱線:18221556971

咨詢熱線:18221556971
常見問(wèn)題 |
Q1:SLM的參數(shù)與加工參數(shù)的關(guān)系? |
最大加工的面積等于場(chǎng)鏡焦距*激光波長(zhǎng)/像素大小。因而對(duì)于1030nm/1064nm的波長(zhǎng),基本可以近似認(rèn)為加工的面積等于場(chǎng)鏡/物鏡焦距的1/12。 并行加工中每個(gè)點(diǎn)的大小:在優(yōu)化足夠好的條件下,每個(gè)焦點(diǎn)的大小與不加SLM,直接通過(guò)透鏡聚焦的點(diǎn)大小一致。 并行加工點(diǎn)之間最小距離:等于最大加工面積/SLM像素尺寸得到的值與并行加工焦點(diǎn)大小的值里的最大值。 |
Q2:使用SLM加工穩(wěn)定性 |
使用SLM進(jìn)行并行加工的時(shí)候,點(diǎn)陣的穩(wěn)定性主要取決于SLM上的相位穩(wěn)定性。根據(jù)文獻(xiàn)使用濱松的SLM,由于相位不穩(wěn)定性導(dǎo)致的點(diǎn)陣的漂移可以用公式場(chǎng)鏡焦距*0.06urad計(jì)算,例如對(duì)于150mm焦距長(zhǎng)度的場(chǎng)鏡,點(diǎn)陣漂移大概是9nm,遠(yuǎn)遠(yuǎn)小于焦點(diǎn)大小,可以忽略不計(jì)。 |
Q3: SLM加工與DOE優(yōu)點(diǎn) |
DOE與SLM均可以對(duì)光束進(jìn)行調(diào)制,來(lái)提高加工效果或者效率,比如生成點(diǎn)陣實(shí)現(xiàn)并行加工,生成縱向多焦點(diǎn)等。然而DOE本身在加工之后,相位調(diào)制就固定了,無(wú)法更改,并且成本也相對(duì)較高。而SLM具有可編程特性,同一個(gè)SLM可以生成多種類型的相位,可以根據(jù)具體的應(yīng)用以及加工參數(shù)隨時(shí)更改,優(yōu)化加工效果,從而為客戶降低成本。而且SLM可以校正系統(tǒng)引入的各種像差,這對(duì)DOE是無(wú)法想象的。 |
Q4: SLM加工與基于普通掃描鏡加工的優(yōu)點(diǎn) |
普通掃描鏡加工是一點(diǎn)一點(diǎn)進(jìn)行加工的,加工速度比較低。而且隨著激光器的發(fā)展,激光器的功率越來(lái)越高,而為了防止損傷工件,在進(jìn)行單點(diǎn)加工的時(shí)候,往往需要降低激光的能量,導(dǎo)致無(wú)法充分利用激光器的功率。 而使用SLM可以生成點(diǎn)陣實(shí)現(xiàn)并行加工,可以顯著的提高加工速度。此外因?yàn)榧す夤β时黄骄峙涞近c(diǎn)陣的各個(gè)點(diǎn)上,因而不需要對(duì)激光器的功率進(jìn)行衰減就可以,從而充分的利用了功率。 |
Q5:載入目標(biāo)圖像的時(shí)候,應(yīng)該選擇什么大小的圖像? |
從分辨率來(lái)說(shuō)載入的目標(biāo)圖像的分辨率越小,CGH的計(jì)算速度越快。 但是對(duì)于同樣的圖案,如果是圖像分辨率比較小的話,生成的衍射圖像中可以清楚的看到圖像是由點(diǎn)陣組成的。 |
而如果圖像分辨率分辨率足夠大,那么衍射圖像中的點(diǎn)陣效應(yīng)就不太明顯。 這是因?yàn)榻?jīng)過(guò)SLM調(diào)制相位之后,在透鏡后焦面最終是在最大加工面積內(nèi)(鏡頭焦距*波長(zhǎng)/像素大小)生成對(duì)應(yīng)目標(biāo)圖像的點(diǎn)陣的(像素值為255,則為亮點(diǎn),為0,則為黑色)。因而點(diǎn)和點(diǎn)之間的最近距離可以用(鏡頭焦距*波長(zhǎng)/像素大小)/目標(biāo)圖案的分辨率得到。所以在目標(biāo)圖像分辨率低的時(shí)候,點(diǎn)和點(diǎn)之間的距離比較大,可以看清楚。但是當(dāng)目標(biāo)圖像分辨率高的時(shí)候,電和點(diǎn)之間距離小,就區(qū)分不出來(lái)了。 從圖像比例來(lái)說(shuō),因?yàn)榻?jīng)過(guò)SLM調(diào)制之后,生成的衍射圖像最大范圍是一個(gè)正方形,所以目標(biāo)圖像最好也使用正方形的比例,這樣計(jì)算之后不會(huì)變形。 |
Q6:能否實(shí)現(xiàn)幅度調(diào)制,偏振調(diào)制? |
雖然濱松的SLM是相位調(diào)制器,但是通過(guò)恰當(dāng)?shù)呐渲靡彩强梢詫?shí)現(xiàn)的,可以通過(guò)在前后添加相應(yīng)的1/4玻片,偏振片等來(lái)實(shí)現(xiàn),如下圖是一個(gè)常見的調(diào)制幅度的光路構(gòu)型。 |

Q7:能否可以實(shí)現(xiàn)同時(shí)控制兩個(gè)SLM? |
可以的,由于濱松的SLM是基于DVI進(jìn)行控制的,本身是無(wú)法識(shí)別SLM的ID 的,所以一個(gè)比較容易實(shí)現(xiàn)的又不容易混亂的解決方案是買一個(gè)DVI轉(zhuǎn)3DVI的轉(zhuǎn)接線,這個(gè)DVI的轉(zhuǎn)接線可以把RGB三色分離到三個(gè)DVI頭,這樣就可以最多同時(shí)控制三個(gè)SLM,把一個(gè)8it的BMP彩色圖像使用matlab或者labview投屏到DVI所對(duì)應(yīng)的顯示器中,則其中一個(gè)SLM獲取的R通道的圖像信息,另外兩個(gè)SLM分別獲得是G通道和B通道的圖像信息。 |
Q8:如何實(shí)現(xiàn)高幀率更換圖像(matlab labview, OEM)? |
濱松自帶的軟件由于編程優(yōu)化問(wèn)題,在進(jìn)行圖像播放的時(shí)候,速度較低,最高只可以實(shí)現(xiàn)大概1幀每秒的播放速度。為了實(shí)現(xiàn)高幀率的更換相位圖像,建議客戶自己使用matlab或者labview進(jìn)行編寫。而對(duì)于OEM類型的SLM,可以預(yù)先將相位圖像存儲(chǔ)到SLM控制板內(nèi)的內(nèi)存卡中,再使用程序控制相位圖的更換,此時(shí)相位圖更換對(duì)比普通類型的SLM少了16.6ms的延遲時(shí)間,因而可以實(shí)現(xiàn)更快的更換速度。 |
Q9: 如何提高并行加工的均勻性? |
并行加工中每個(gè)點(diǎn)強(qiáng)度的均勻性是由兩點(diǎn)決定的,一是IFTA算法本身的計(jì)算效果。二是光路的偏折,激光模式不好,光路中透鏡引入的像差等。因而對(duì)于加工均勻性要求不是特別高的場(chǎng)合,可以使用普通的GS算法就可以了。如果希望提高加工均勻性,可以使用效果比較好的算法,比如GSW,GSA算法等。而如果希望加工均勻性達(dá)到最佳,則需要使用額外的相機(jī)觀察并行光斑強(qiáng)度,基于這個(gè)強(qiáng)度分布反饋給SLM進(jìn)行優(yōu)化,從而達(dá)到最佳。 |
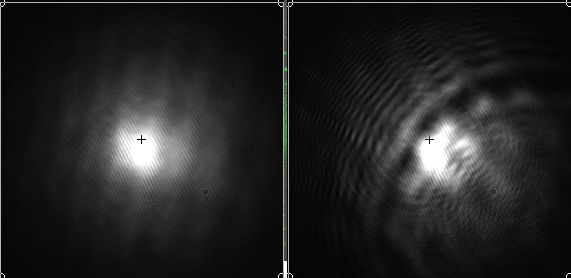
Q10:消除零級(jí)光的方式(光柵和菲涅爾對(duì)比,小block方式) |
零級(jí)光是由于SLM表面玻璃反射,像素間隔之間的反射,以及相位圖本身效率不高導(dǎo)致的。所以消除零級(jí)光的方式首先是改進(jìn)算法,如下圖是分別使用GSW算法(左圖)和GS算法(右圖)計(jì)算點(diǎn)陣得到的結(jié)果,可以看到由于GSW計(jì)算的相位圖有更高的衍射效率,所以0級(jí)光相比于GS算法得到的結(jié)果顯然更佳微弱。 |
此外常見的用來(lái)消除0級(jí)光的方式包括疊加菲涅爾透鏡透鏡相位(使衍射圖像和0級(jí)光在z方向分離)與疊加閃耀光柵相位(將衍射圖像和0級(jí)光在xy方向上分離,從而可以使用光擋將0級(jí)光徹底去除)。此外有文獻(xiàn)發(fā)現(xiàn),同時(shí)疊加菲涅爾透鏡相位和閃耀光柵相位,對(duì)于消除0級(jí)光的效果更佳。 |
Q11:在進(jìn)行IFTA計(jì)算的時(shí)候,是否要考慮入射光的分布? |
最好可以考慮入射光強(qiáng)的分布,不過(guò)這個(gè)主要是可以提高光的衍射效率,降低0級(jí)光的影響,但是對(duì)并行加工時(shí)點(diǎn)陣的均勻性影響不大。 |
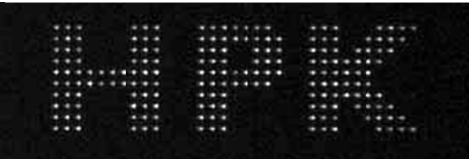
Q12:如何快速確定SLM好使(SLM上有圖像, -400mm菲尼爾) |
主要分為3步: 1、連接電腦,打開SLM,查看第二顯示器,可以看到SLM被識(shí)別,分辨率準(zhǔn)確。這步證明控制器與電腦連接沒(méi)有問(wèn)題。 2、直接觀察SLM表面,隨便在電腦上拖動(dòng)一個(gè)文件夾到第二顯示器界面晃動(dòng),可以在SLM上文件夾的移動(dòng)。這步證明SLM的頭與控制器的連接沒(méi)有問(wèn)題。 3、設(shè)置好波長(zhǎng),選擇HPK圖像,右鍵選擇create CGH, 然后在2nd monitor設(shè)置菲尼爾透鏡焦距為-400,選擇激活菲尼爾透鏡相位,此時(shí)在距離SLM大概400mm的位置,就可以看到清晰的HPK圖像了。這步證明SLM工作沒(méi)有問(wèn)題,對(duì)于不執(zhí)著于使用相機(jī)和透鏡進(jìn)行觀測(cè)的客戶,就可以完成驗(yàn)收了。 |
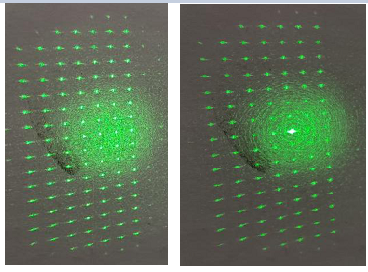
Q13: 為什么加了校正相位,直接觀察反射光斑反而變差了,如下圖左圖為不疊加校正相位,下圖為疊加校正相位。 以及為什么不疊加校正相位,同時(shí)還可以得到不錯(cuò)的衍射圖像。 |
因?yàn)镾LM內(nèi)部反射介質(zhì)鏡或者鋁鏡的不平整度實(shí)際上是連續(xù)的平滑的不平整,所以直接觀察反射光效果會(huì)很好。而為了校正表面不平整,疊加的相位圖大體如下圖所示 |

可以看到相位中有一些0到2pi的階躍,這些階躍相位會(huì)導(dǎo)致衍射效應(yīng),使光斑效果不佳。但是如果使用透鏡,在透鏡后焦點(diǎn)位置觀察衍射圖像的效果的話,效果會(huì)變的更好的。 此外相位校正圖像是在25度的環(huán)境下測(cè)量和計(jì)算得到的。如果工作的環(huán)境與25度偏差角度,也會(huì)影響最終的實(shí)驗(yàn)結(jié)果的。 而對(duì)于為什么不疊加校正相位,仍然可以得到不錯(cuò)的衍射圖像,這是因?yàn)槿缟纤觯琒LM內(nèi)反射鏡不平整是平滑的很連續(xù)的,這些平滑的相位變化,在經(jīng)過(guò)透鏡之后,對(duì)衍射圖像幾乎沒(méi)有影響。所以即使不疊加校正相位,仍然可以得到不錯(cuò)的衍射圖像。 |
Q14: SLM生成平頂光的幾種方案 |
生成平頂光整體有四種主流方案: 第一種是模擬非球面鏡相位來(lái)直接在透鏡后焦面生成平頂光。 第二種是在SLM上生成光闌型相位,只選取光斑中間部分,然后進(jìn)行放大,從而生成各種形狀的評(píng)定光。 第三種是利用SLM與小孔光闌的配合,在光闌后經(jīng)過(guò)透鏡準(zhǔn)直后光斑的強(qiáng)度和相位分布與SLM上的相位分布有關(guān),因而可以在保證平頂光的同時(shí),相位也很平整。 第四種是簡(jiǎn)單的將目標(biāo)圖像設(shè)置為平頂形狀,然后使用GS算法進(jìn)行計(jì)算即可。但是由于GS算法無(wú)法保證透鏡后焦面光斑的相位分布,所以可能會(huì)存在一些pi相位,或者渦旋相位,導(dǎo)致某些區(qū)域光斑相消,出現(xiàn)強(qiáng)度0點(diǎn),從而降低均勻性。為了解決這個(gè)問(wèn)題,可以采用MRAF算法等。 |
Q15: SLM生成縱向多焦點(diǎn)的方案 |
生成縱向多焦點(diǎn)大概有三種方案: 第一種是根據(jù)每個(gè)多焦點(diǎn)的位置,然后計(jì)算出來(lái)為了生成這個(gè)焦點(diǎn),所需要加載的菲涅爾透鏡相位,然后把所有多焦點(diǎn)對(duì)應(yīng)的菲涅爾透鏡的相位疊加起來(lái)。優(yōu)點(diǎn):算法特別簡(jiǎn)單,計(jì)算速度快。缺點(diǎn):均勻性一般,點(diǎn)之間干擾嚴(yán)重。 第二種是直接使用三維的GSW或者ORA算法;優(yōu)點(diǎn):均勻性顯著提高,點(diǎn)之間干擾也改善。缺點(diǎn):算法較為復(fù)雜。 第三種是利用空間光強(qiáng)度分布和其k空間的互為傅里葉變換的關(guān)系,然后k空間相位可以直接通過(guò)投影得到SLM上所需要的相位信息的原理進(jìn)行計(jì)算的。 由于是直接對(duì)焦點(diǎn)區(qū)域的整個(gè)三維空間分布進(jìn)行,所以得到的結(jié)果無(wú)論從均勻性,還是從點(diǎn)之間的干擾,都有特別好的效果。此外,也會(huì)考慮高數(shù)值孔徑的情況。因而是最優(yōu)的算法。缺點(diǎn):三維的FFT和IFFT可能沒(méi)有直接的函數(shù),需要用于自己編寫。 |
Q16: SLM適合的領(lǐng)域和不適合的領(lǐng)域 |
#適合的領(lǐng)域: |
1、在加工過(guò)程中,相位需要變化的領(lǐng)域。比如隱形切割需要對(duì)不同層進(jìn)行加工,不同層所需要的校正像差的相位不同。或者比如斜面貝塞爾切割,不同角度需要的相位也不同。比如內(nèi)部打標(biāo),不同樣品的厚度不同,需要加載的像差校正行為也不同。 ? 2、尺寸超小的并行加工。比如微型光存儲(chǔ),細(xì)胞級(jí)別,微納米級(jí)別的加工 。 3、精度很高要求的加工,由于SLM相位穩(wěn)定性好,所以加工精度可以獲得比振鏡更好的效果 。 4、多點(diǎn)同時(shí)掃描的加工,比如分成多點(diǎn)同時(shí)進(jìn)行切槽 。 |
#不適合的領(lǐng)域: |
1、大范圍的打標(biāo),由于SLM像素尺寸有限,所以加工幅面不是很大,對(duì)于大尺寸的打標(biāo),往往基于振鏡反而有更快的效果。 ? 2、成本要求很低的應(yīng)用 。? 3、相位要求一成不變的應(yīng)用,很多時(shí)候會(huì)被DOE所取代。 |
Q17: JIZAI的主要優(yōu)勢(shì) |
穩(wěn)定性和可重復(fù)性超級(jí)高,能夠保證客戶批量購(gòu)買之后,每臺(tái)都提供非常接近的性能。 根據(jù)客戶的需求,我們可以從硬件,光學(xué),電學(xué),軟件等多個(gè)方向提供定制。方便客戶使用。 |
Q18: SLM產(chǎn)生平頂光的幾個(gè)思路 |
a) 是直接使用普通的IFTA算法,將目標(biāo)圖像設(shè)置為方形或者圓形即可。本方法優(yōu)點(diǎn)是算法簡(jiǎn)單,可以生成任意圖像,衍射效率較高。這種方法的缺點(diǎn)是是由于vortex之類的存在,最終生成的平頂光有較強(qiáng)的speckle noise。 可以采用類似于MRAF算法來(lái)改進(jìn)這個(gè)問(wèn)題。 b) 第二種是直接使用現(xiàn)成的非球面相位公式來(lái)生成平頂光。優(yōu)點(diǎn)是衍射效率高,均勻性較好。可以通過(guò)疊加光柵相位來(lái)生成多個(gè)平頂光。缺點(diǎn)是均勻性沒(méi)有辦法到極致,并且形狀有限制,只能為方形,圓形,線型平頂光。 c) 第三種是類似于基于可變型光闌的方式,優(yōu)點(diǎn)是均勻性很高,可以任意形狀。缺點(diǎn)是無(wú)法生成多個(gè)平頂光,并且衍射效率相對(duì)較低。 d) 第四種是采用在4f系統(tǒng)中放置一個(gè)光闌的思路來(lái)實(shí)現(xiàn)的。優(yōu)點(diǎn)是可以同時(shí)調(diào)制光的強(qiáng)度和相位,并且平頂光的景深更深。缺點(diǎn)是需要采用反饋機(jī)制來(lái)實(shí)現(xiàn)調(diào)節(jié),并且對(duì)光路調(diào)節(jié)要求較高。 |
Q19: SLM產(chǎn)生縱向多焦點(diǎn)的幾個(gè)思路 |
a) 直接把不同層的圖像,疊加不同焦距的菲涅爾透鏡相位,得到不同的相位圖A,B,C,然后把各個(gè)相位圖疊加起來(lái)。優(yōu)點(diǎn):算法簡(jiǎn)單,速度很快。缺點(diǎn):均勻性一般,層與層之間的干擾比較大。 b) 采用類似于三維GSW和ORA等算法。直接對(duì)整個(gè)點(diǎn)陣進(jìn)行計(jì)算,沒(méi)有后疊加的過(guò)程。優(yōu)點(diǎn):均勻性好。缺點(diǎn):速度一般,層與層之間的干擾也比較大。 c) 直接對(duì)焦點(diǎn)的整個(gè)光場(chǎng)分布進(jìn)行三維FT和IFT計(jì)算。優(yōu)點(diǎn):均勻性高,層與層干擾小,可以實(shí)現(xiàn)各種異型光束。缺點(diǎn):內(nèi)存占用大,對(duì)計(jì)算機(jī)要去較高。 d) 采用分區(qū)域菲涅爾透鏡方式。優(yōu)點(diǎn):均勻性高,層與層干擾小。缺點(diǎn):只能適合每層有一個(gè)焦點(diǎn)的類型。 |
Q20: 如果SLM上載入了相位,但是在透鏡后焦面沒(méi)有產(chǎn)生效果,主要原因是什么? |
這種情況,一般可以考慮輸入光的偏振是否有問(wèn)題。需要保證光是水平偏振,如果感覺(jué)SLM根本不好使一樣,那大概光是垂直偏振了。 |
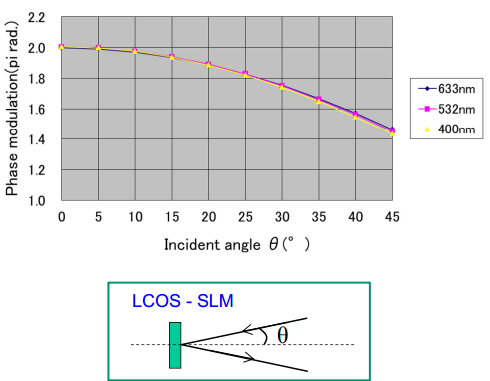
Q21: 如果SLM入射角度大于5度,主要會(huì)發(fā)生什么? |
在將SLM相位設(shè)置為2pi的情況下,SLM實(shí)際加載的相位與光的入射角度關(guān)系為下圖 |
全國(guó)咨詢熱線:
上海尤譜光電科技有限公司
電子郵件:sales@upu-opt.com
地址:上海市普陀區(qū)祁連山南路2888號(hào)耀光中環(huán)國(guó)際廣場(chǎng)A幢1702室
